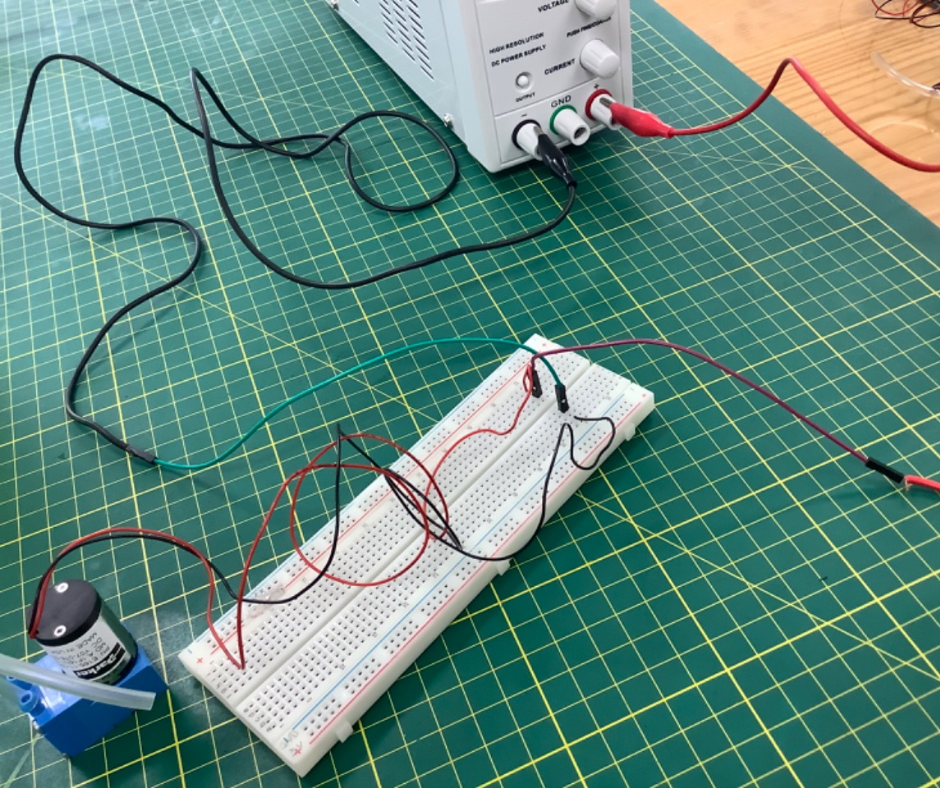
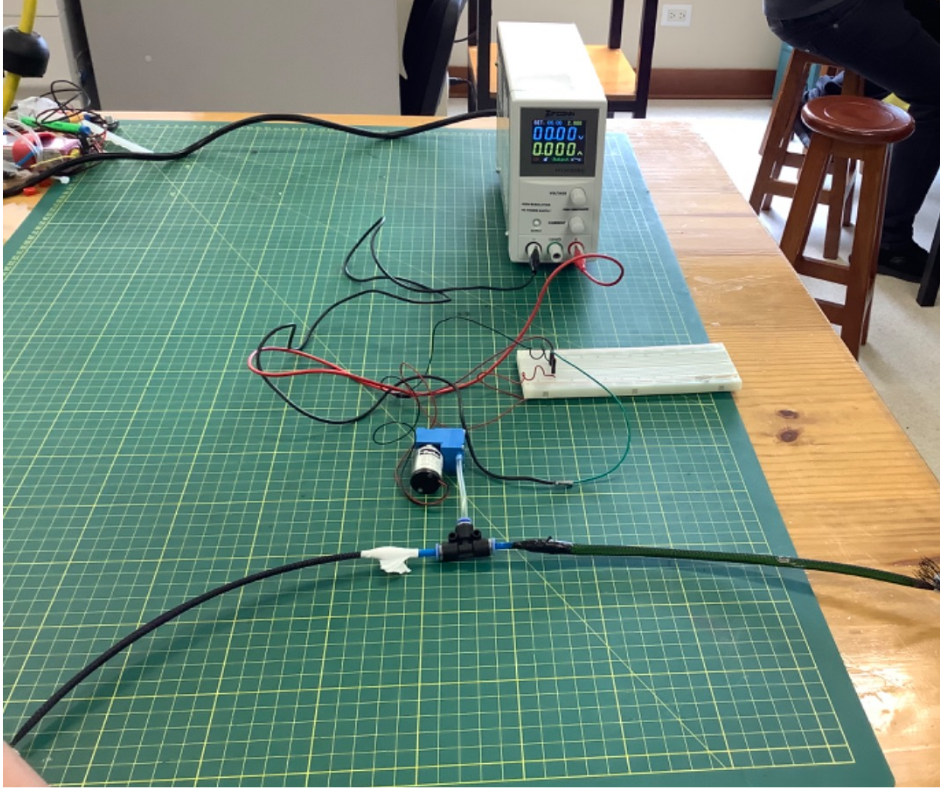
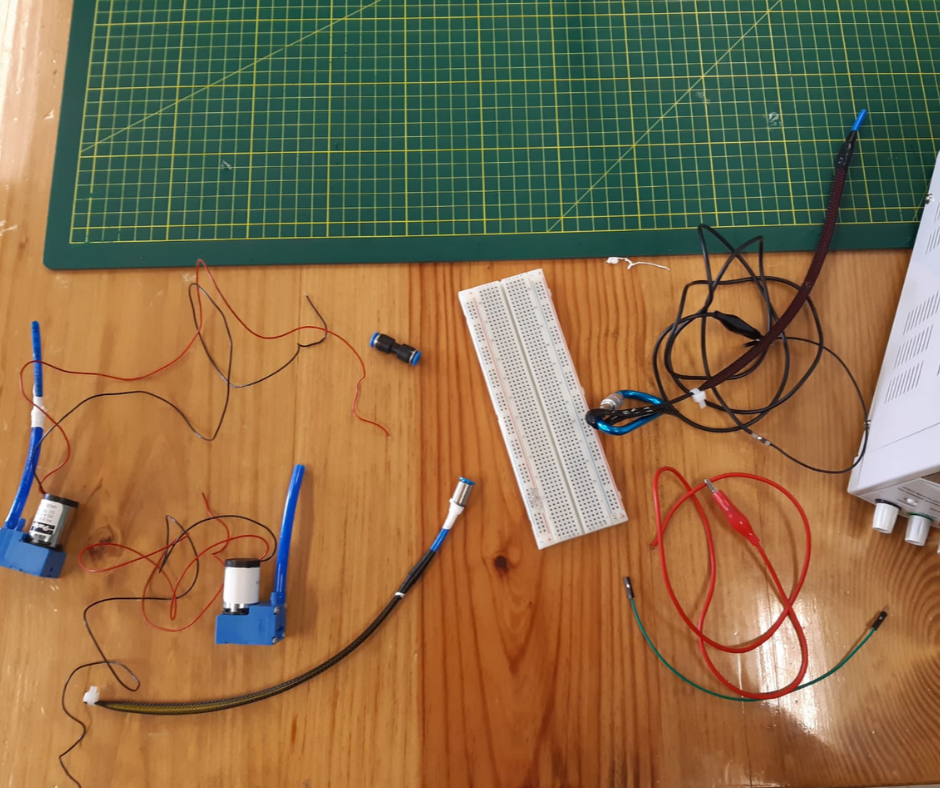
Metodología:
- Asegurar las conexiones de salida entre el motor Parker E165-11-090 y el actuador McKibben
- Alimentar el motor mediante la fuente (9VDC)